多智能体分布式控制系统
工业控制系统的发展从集中、集散式控制系统(DCS)、现场总线控制系统(FCS)到智能控制系统(ICS),控制单元日益智能化,已经具备了智能体(Agent)的基本特征,控制方式日益走向多智能控制单元协同工作的模式,整个控制系统已经具备了多智能体系统(Multi-Agent System, MAS)的雏形,基于多智能体的分布式控制系统是工业控制的发展方向。
2003年我们提出了“将控制系统中的传感器、执行单元和控制单元均升格为Agent,根据控制任务的需要形成动态Agent联盟,以协作的方式低代价地完成控制任务”的思想。该方向的研究先后获得了国家自然科学基金等4项基金的资助。
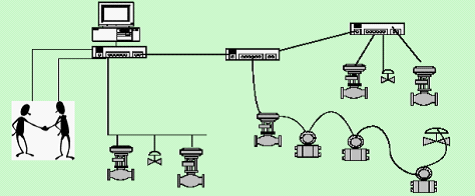
图1. 基于多智能体的分布式控制系统
创新要点:
1、在国际上最早将进化计算引入联盟求解过程,有效解决了计算资源受限环境下协作联盟的快速生成问题;
2、提出了多任务多联盟串行、并行生成算法,丰富了协作联盟理论,较好地解决了复杂大系统中各智能子系统之间的协调合作问题;
3、将Nash平衡引入多Agent系统,提出一种新的效用分配策略,较好地解决了协作联盟的稳定性问题。
获奖:
“基于MAS的分布式智能控制系统中联盟形成机制”,2010年安徽省自然科学二等奖。
代表性论文:
【1】Guofu Zhang, Jianguo Jiang, Zhaopin Su, Meibin Qi. Searching for overlapping coalitions in multiple virtual organizations [J]. Information Sciences (IF: 3.291), 2010, 180(17): 3140-3156
【2】Guofu Zhang, Jianguo Jiang, Changhua Lu, Zhaopin Su. A revision algorithm for invalid encodings in concurrent formation of overlapping coalitions [J]. Applied Soft Computing (IF: 2.018), 2011, 11(2): 2164-2172
【3】夏娜, 蒋建国. 改进型蚁群算法求解单任务Agent联盟[J]. 计算机研究与发展, 2005.5, 42(5):734-739 (他引31次)
【4】蒋建国, 夏娜. 一种基于蚁群算法的多任务联盟串行生成算法[J]. 电子学报, 2005, 33(12):2178-2182 (他引30次)
【5】蒋建国, 夏娜. 基于能力向量发挥率和拍卖的联盟形成策略[J]. 电子学报, 2004, 32(12A):215-217 (他引24次)
科学价值:
研究成果不仅推动了智能控制理论的发展,同时丰富了MAS、计算智能等理论的应用,促进了学科交叉,具有重要的科学价值。随着科技的发展,越来越多的复杂应用系统均可描述为分布式智能系统,如动态企业联盟、传感器网络、灾害应急响应等,因此该成果可以为这些系统的构建提供理论指导和方法依据,应用前景广阔。2005年,部分成果应用于“CRI2002企业铁路智能运输调度综合信息平台”项目,取得了良好的效果,该项目获2007年国家科技进步二等奖。